| 后台-系统设置-扩展变量-手机广告位-内容正文顶部 |
2026 年 1 月 15 日,萝博派对(Roboparty)在官方 GitHub 仓库正式完整开源双足人形机器人 “萝博头原型机(Roboto_Original)”,并同步启动全球开发者共创计划。

▲萝博派对Github主页
这款搭载拟人步态的 AMP 运控算法、跑步速度达 3m/s 的原型机,凭借全栈透明的技术开放模式,成为目前全球范围内技术成熟度领先的全开源人形机器人。
不同于“只开源代码或只开源结构图”的碎片式开放,本次开源以“可复现、可二开、可验证”为目标,覆盖参考硬件、控制/训练栈、工程化调试与验证方法,以及长期维护的行业 Know-how 共创知识库。
萝博派对希望把“从 0 到跑”做成行业共享的具身 Infra 底座:把路径标准化、把经验工具化、把验证流程公开化,推动行业把时间用在真正的场景与能力突破上。
全栈开源,直击人形机器人开发痛点
人形机器人真正的门槛,往往不在某一个算法点,而在“从设计—装配—标定—训练—验证—迭代”的系统工程。基于此,萝博派对针对行业长期存在的三大核心痛点——闭源导致开发壁垒高、设计规范缺失、架构标准不统一——以“可复现、可二开、可验证”为目标,正式发布双足人形机器人“萝博头原型机”的全栈开源方案,并同步推出“动手学人形机器人问题清单”Know-how 共创文档,推动行业经验从“各自积累”走向“公开共享”。
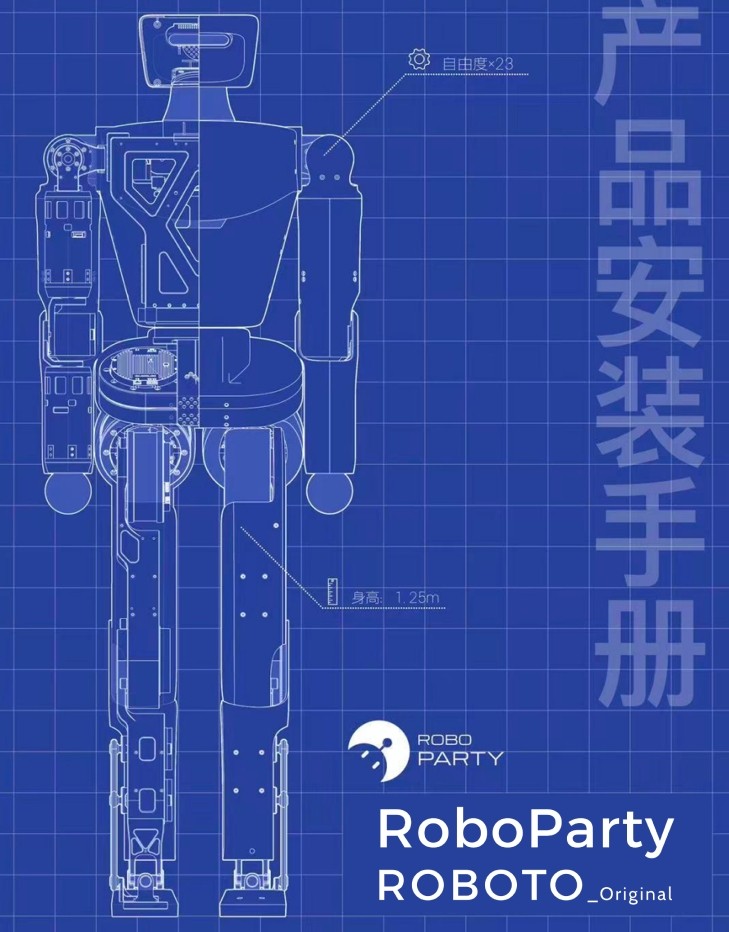
▲安装指南
在硬件层面,萝博头原型机公开 1.2m 身高、30kg 重量级本体的全套结构图纸,覆盖关节排布、线束收束方案以及金属结构件选型标准等关键设计细节。同时,项目同步开放关节模组核心参数、选型指南与拆机报告,并提供国内优质供应商清单,配套完整 EBOM 物料清单与 SOP 组装流程,从采购、装配到复现路径形成闭环,显著降低硬件研发与复刻门槛。

▲原型机在仿真环境中跑步/跳舞
在软件与控制层面,项目开放底层控制全量代码,涵盖模仿运动、感知运动与导航运动三大核心模块,并支持 SMPL-X 人体模型适配,使开发者能够直接复用海量人体动捕数据,减少新任务开发中的微调成本,提升能力迁移效率,缓解传统控制方案在泛化性与工程落地上的不足。同时,萝博头原型机同步开源拟人步态的 AMP 运控算法代码,为步态自然度与运动稳定性的进一步迭代提供可直接复用的技术基础。
在工程化落地层面,萝博派对将研发过程中形成的 sim2real gap 弥补方案、样机测试矩阵与调试经验总结系统化公开,并同步沉淀关键避坑要点与流程规范,帮助开发者与合作团队减少重复试错、提升调试效率,让“跑起来”不再依赖隐性经验,而是可以被复现、被验证、被持续迭代的工程流程。

▲知识库首页图
与此同时,萝博派对长期建设并持续维护“动手学人形机器人问题清单”共创知识库,覆盖行业发展、硬件研发、软件研发与生产制造等关键环节,旨在将行业讨论从“表演型炫技”拉回“实用落地”。该知识库主张人形机器人优先解决行走稳定性、抗摔性等基础能力,并围绕尺寸、重量、散热、成本等量产关键问题展开共建,以“全员编辑、按紧急度排序”的开放机制,将单一团队的经验沉淀升级为“全行业共建的落地指南”,推动行业从“各自试错”走向“协同突破”。
核心突破:性能与步态双达标
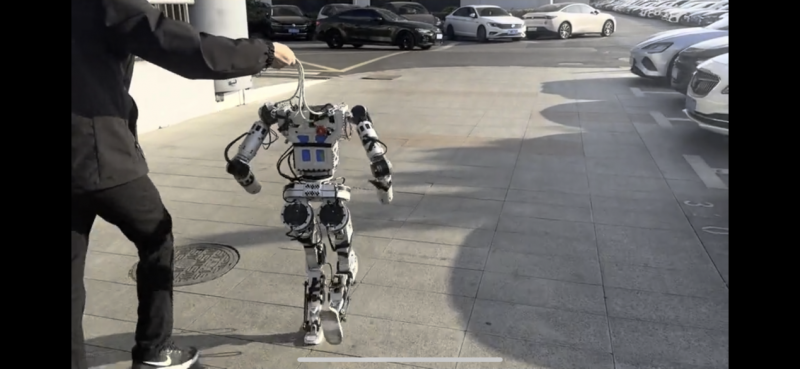
▲机器人跑步实拍
萝博头原型机的关键优势,在于“硬件性能”与“控制体验”的同步提升。
在运动能力上,原型机跑步速度达到 3m/s 级别,跻身全球全开源人形机器人第一梯队,回应了行业长期存在的“开源性能滞后于闭源”的刻板印象。为支撑高速与稳定运行,硬件端采用类车规级本体结构与高刚性金属材料,提升力传递效率与整体结构稳定性;同时通过模块化关节模组实现更高的扭矩密度与更快的动态响应,为跑步与复杂动作提供可靠的执行基础。
在控制体验上,萝博头原型机搭载拟人步态的 AMP 运控算法,作为其核心控制能力底座。该算法基于数据驱动范式,并深度适配 Behavior Foundation Model(BFM)预训练框架,通过学习人体动捕数据,使机器人的行走与跑步更贴近人类生物力学特征,在提升动作自然度的同时兼顾稳定性表现,能够在复杂路况中保持更可靠的姿态控制。同时,这一范式显著降低新步态与新任务的微调成本,使步态扩展从“重研发”转向“可迁移、可复用”的工程流程。
对开发者而言,这意味着在不额外承担高昂研发投入的前提下,即可获得兼具高性能与自然步态的人形机器人参考方案,并在此基础上更高效地进行二次开发与场景适配,加速具身能力向真实应用落地。
生态共建:以开源推动协同创新
▲GitHub主页截图
此次开源是萝博派对推进人形机器人行业协同生态建设的关键一步。在开发者生态层面,团队已搭建面向行业的技术交流与共创网络,吸引上市公司技术负责人、高校科研人员及创业公司核心成员等专业群体加入,形成更高效率的技术交流与资源共享平台,持续推动经验沉淀与问题协作解决。
在商业与产业层面,该项目已获得经纬创投、小米战投、光源资本等机构的千万美元种子轮融资。萝博派对认为,这不仅是对团队技术路线与工程能力的认可,更是对“具身智能 Infra 化”路径的验证:通过开源与标准化,把开发所需的关键链路沉淀为可复用的基础设施,让行业将更多精力投入到真实场景与能力创新之中。
“我们的目标是让具身智能的开发成本降低 80%。”萝博派对团队表示,当硬件不再成为门槛、算法不再是黑盒,具身智能才能真正进入“千行百业”的应用阶段,形成规模化的产业价值。

▲原型机和LOGO合影
除开源共创外,萝博派对也为产业伙伴提供 JDM(联合定义制造)设计与联合开发,加速从参考样机到工程化交付的全流程,覆盖结构/电气/控制集成、BOM 与供应链、试产与测试矩阵等关键工作。
目前,全球开发者可通过官方渠道获取核心资源与参与共创:
萝博头原型机开源仓库已在 GitHub 上线,作为从硬件到软件的汇总入口,保持持续更新。
同时,团队长期维护“动手学人形机器人问题清单”Know-how 文档,鼓励开发者通过社区参与编辑、提交行业痛点与复现经验,共同建设可持续迭代的落地知识库。
萝博派对将持续基于社区反馈优化技术方案,推动行业从“各自为战”走向“协同共赢”,并欢迎全球开发者加入共创,探索人形机器人技术在真实场景中的实用化落地路径。